Network Extension and UxS Control Using Commercial Off The Shelf Hardware


Notable Contributions
UGS funding was provided by the CSU Bakersfield Fab Lab.
Funding was also provided by a grant from Amateur Radio Digital Communications (ARDC).
Experiments were conducted at the Naval Postgraduate School (NPS)'s Joint Inter-agency Field Experiment 21-4 (JIFX) in August 2021.
AREDN is Copyright © 2015-2021 Amateur Radio Emergency Data Network Inc. More information on AREDN can be found at www.arednmesh.org
Background
A comprehensive background on our participation in JIFX is available here.
Experiments
Experimenters:
- PI: Bobby Hartsock KJ6YOA rhartsock@csub.edu, CSU Bakersfield Fab Lab
- SME: Vivian Richards vrichards@splunk.com, Splunk
- SME: Greg Albrecht W2GMD gba@undef.net, Bay Area Mesh
This experiment proposed testing these Unmanned Systems capabilities:
- Can a UGS be assembled using Commercial Off The Shelf (COTS) components and Open Source?
- Can a UGS be Commanded & Controlled (C2) via a Wireless Ad-hoc Mobile Network (MANET), the MANET also built with COTS & Open Source?
- Can a UGS "extend" (C3) this MANET?
The system tested makes use of COTS wireless networking equipment, and COTS Components with Open Source software & hardware for UxS C2. A PC running Ground Control (GCS) software linked to the MANET connects to the UxS and allows for Positive Control or updating of autonomous mission data. The MANET allows for control around environmental obstacles that would obstruct conventional point-to-point or line-of-sight wireless networks, and the UxS itself functions as a member of the MANET allowing for greater wireless coverage, including coverage for increasingly distant UxS platforms, neighbor UxS, individual personnel, and sensors.
COTS MANET capabilities derived from the Amateur Radio Emergency Digital Network (AREDN) firmware running on compatible hardware. UxS’ utilized in this experiment were ground-based (UGS), but this experiment could be adapted to other domains, such as maritime and airborne operations.
Novel Capabilities
Capabilities developed within the scope of the B-02 experiment:
- UGS C2 and C3 over AREDN MANET using multiple fixed or moving hops, including other UxS.
- AREDN MANET extension using UGS.
- UGS & MANET using COTS & Open Source.
- UGS-based, MANET-connected, sensor & ISR Platform using COTS & Open Source.
- Real-time UGS & MANET analytics using Splunk Enterprise and Splunk Machine Learning Toolkit.
Ad-Hoc Experimentation
Viability of this experiment was proven early in the field-testing schedule, allowing time for ad-hoc and novel experimentation.

- Acting as a UGS-based ISR Platform, can the UGS collect sensor data from its environment using its on-board systems, such as its MANET radio ("RF Sensor"), onboard Camera ("Optical Sensor"), GNSS, IMU, et al?
- Acting as a UGS-based MANET node, can the UGS & MANET be used to push C2, SA & ISR data to an analysis tool in real-time?
- Can this data be made actionable with Machine Learning?
- Can UGS & MANET system performance/quality, cybersecurity posture, and maintenance needs be observed and monitored?
- Can the UGS be used as a platform for other payloads, such as a LIDAR?
- Can the UGS operate in GPS-denied environments, including underground?
- Can the UGS be intercepted by a ground-based ISR?
- Can the UGS extend other non-AREDN MANETs?
UGS mounted LIDAR & Underground Mesh
Working with Exyn, CSUB reconfigured a UGS to support carrying a LIDAR scanner payload. Once the payload was mounted, UGS were tasked by Mission Plan to traverse an underground tunnel. An unexpected but recoverable failure encountered during this mission was the navigation and IMU fail safes built into the UGS Mission Planning software. This fail safe was encountered due to the GPS denied nature of an underground tunnel, and its curved walls causing a significant delta in vehicle pitch. If bypassed the experiment could continue.
Piloting the UGS into a tunnel also required extending the mesh network into an underground, network-denied environment. This was accomplished using several MANET Compact Rugged Unattended Mesh Box (CRUMB)s placed strategically around the tunnel complex, each extending the mesh into the tunnel and allowing continuous C2 while underground.
UGS as a ground platform

CSUB worked with Hypha & 3am Innovations to adapt a Hypha MANET radio and tablet as payloads on the UGS. Once attached the UGS could extend the range of the Hypha MESH in real-time, as well as provide PLI through the 3am application.
Quantitative Observations
- The longest single hop distance tested was slightly over 3500 feet using omnidirectional antennas. The link remained performant and there was likely considerable extra range to spare.
- The maximum number of hops tested was 4. The connection was reliable across any number of hops.
- The maximum number of simultaneous low latency video feeds was 2. The network had excess bandwidth capability.
Qualitative observations
- The network performed very well overall.
- The 5ghz radios used in this test were highly susceptible to LOS obstruction. This was counteracted by the mesh nature of the network.
- Latency started to become a slight hindrance to precision manual operation of the vehicle after 3 hops. Manual operation of the vehicle in areas not requiring a very high degree of precision was still easily achievable.
- Autonomous waypoint following showed a high degree of repeatability.
- Underground operations of the UGS will require the disabling of failsafes meant to shut down the system upon suspected failure of the navigation sensors.
- Interfacing with WinTAK functioned reliably.
System Descriptions
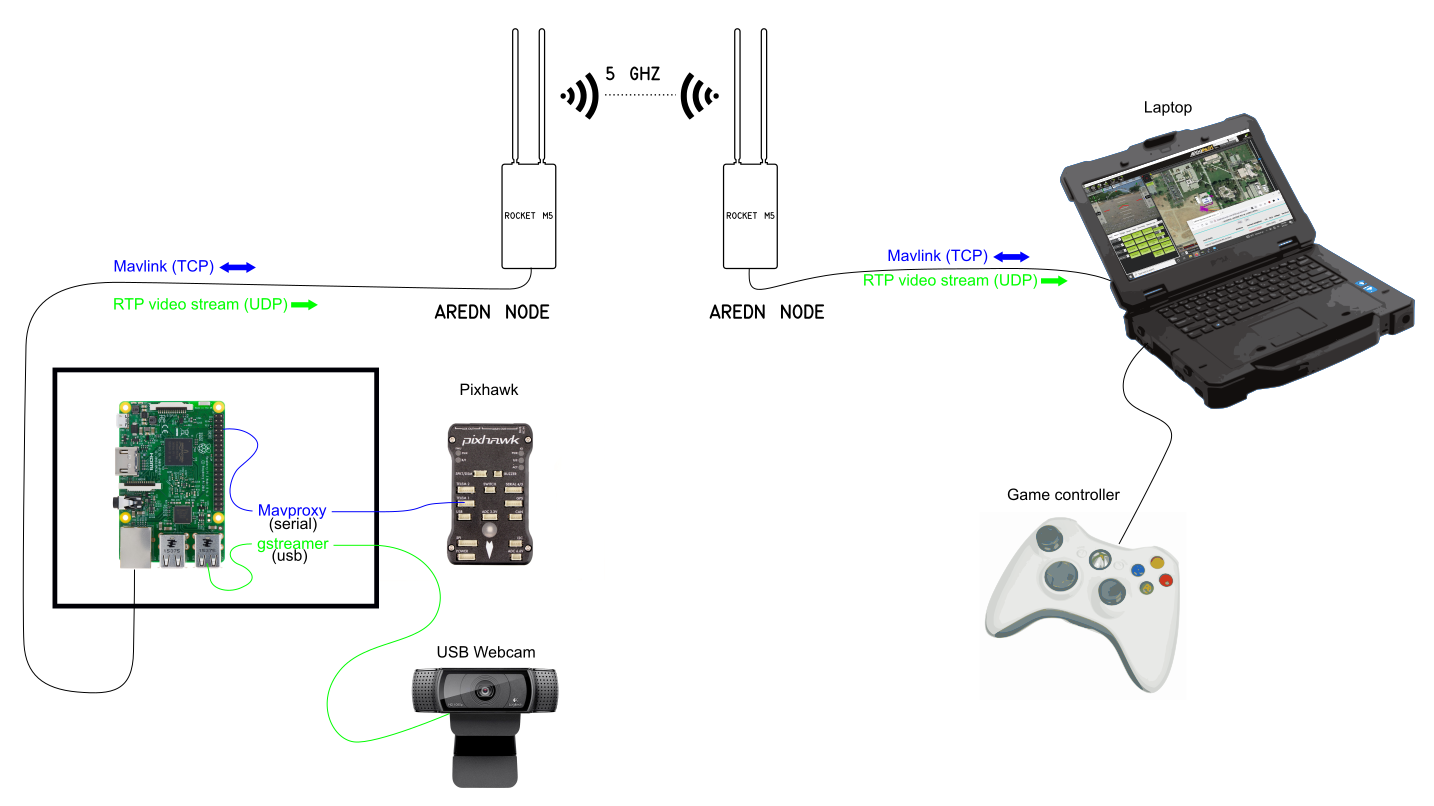
End to end UGS System
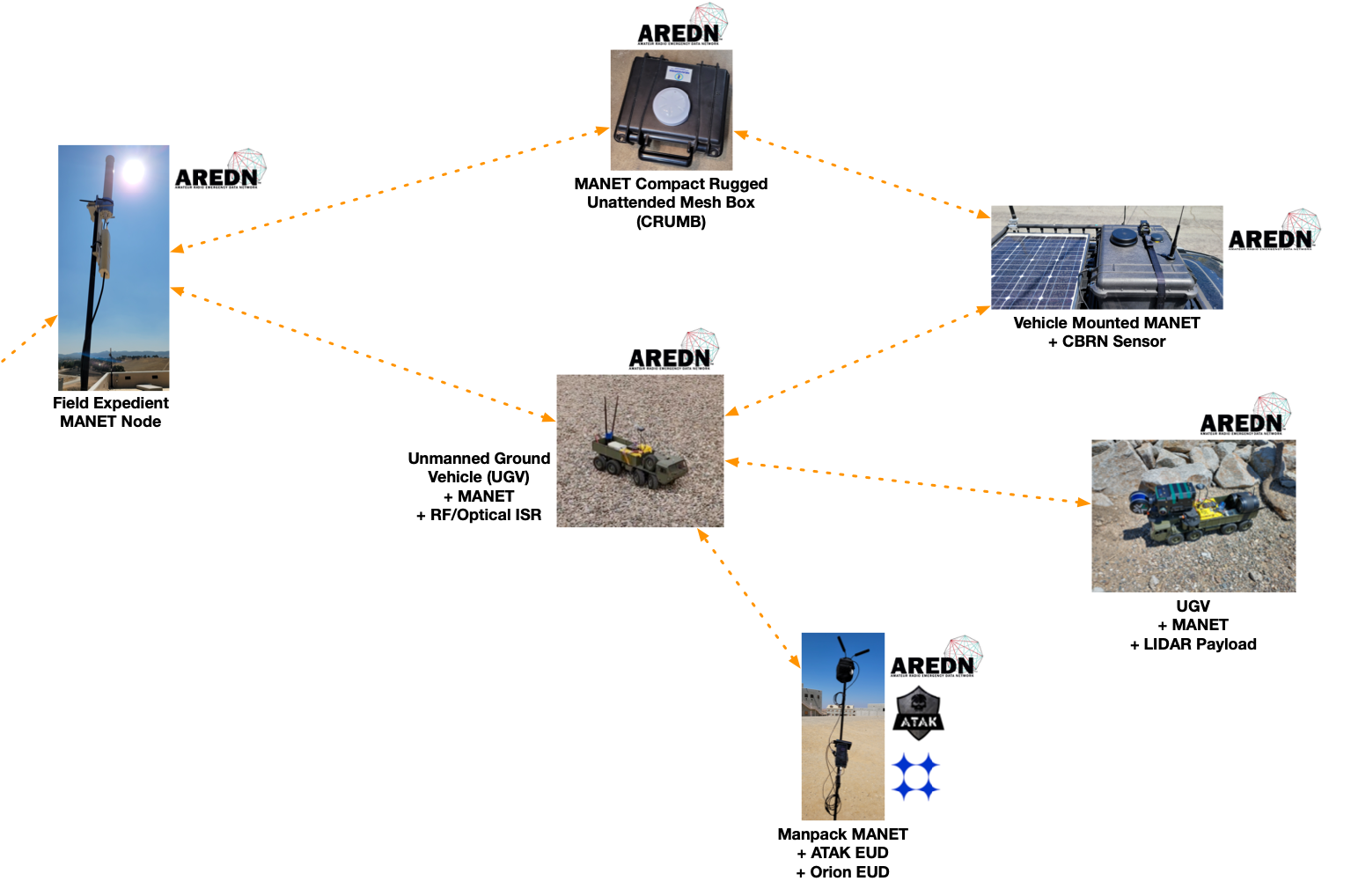
UGS MANET Neighborhood
Portable UGS ground control station (GCS)
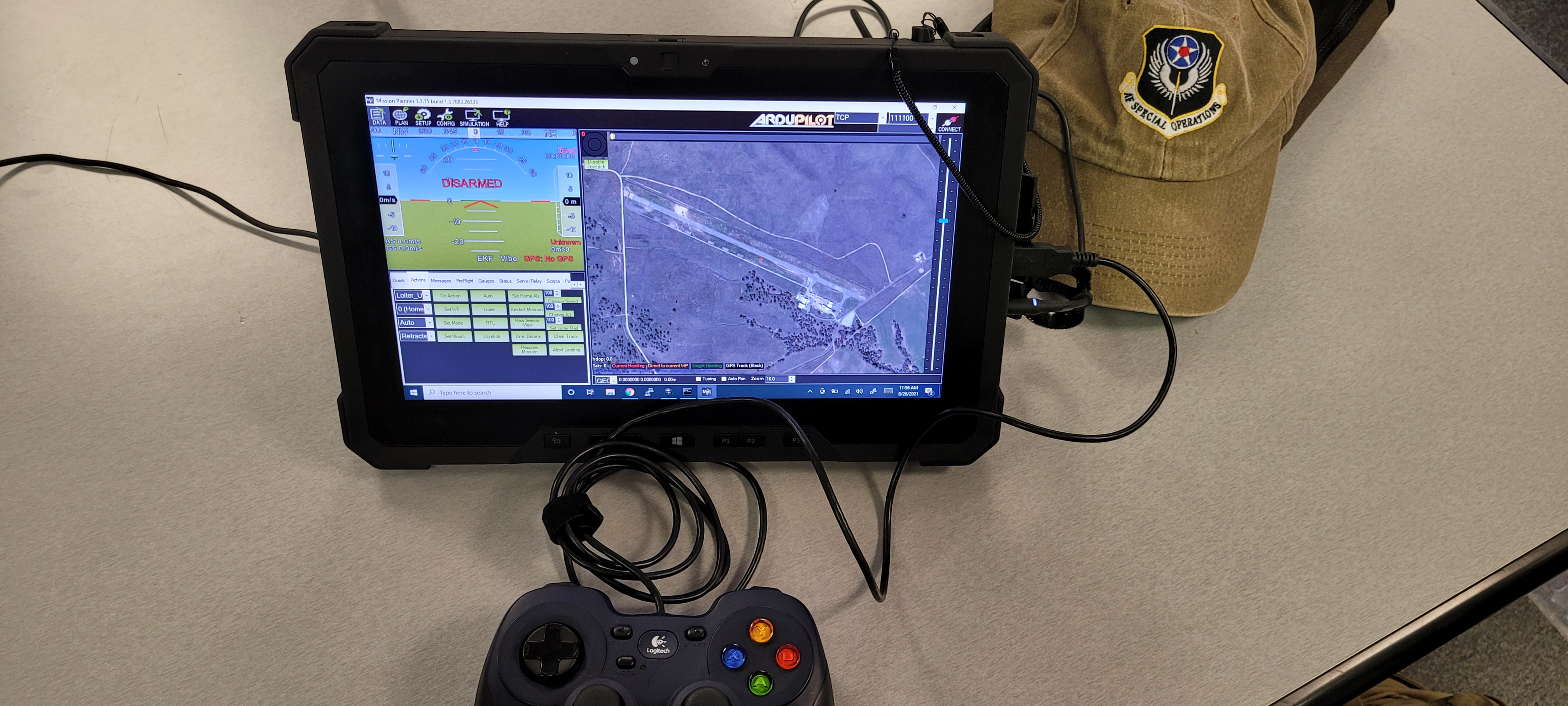
The Portable GCS comprised the computer, software and hardware required to control the UGS. Piloting and Mission Planning utilized ArduPilot, “an open source, unmanned vehicle Autopilot Software Suite”. Manual UGS piloting utilizing a Logitech F310 Gamepad USB controller attached to the GCS computer, a Dell Latitude 12 Rugged Tablet (7202) running Windows 10. On-screen UGV video was transcoded & displayed using ffmpeg, VLC & gstreamer.
Additionally, WinTAK was used to transform UGS positioning data into a format compatible with other TAK systems, see note under Data > Splunk.
