Mesh on Wheels (MoW)
A portable Smart Wireless Mesh node with edge compute, data transformation & sensor capability.
Mesh on Wheels (MoW) is a portable vehicle mountable Smart Wireless Mesh “node”. The MoW is capable of connecting to & extending a mobile ad-hoc network (MANET) and enabling edge-compute, ISR data transformation, sensor/IoT, SDN & SDR. MoW includes an on-board solar-charge controller and batteries, allowing for power on-the-go or fixed installation.
MoW was developed by Greg Albrecht W2GMD for the Bay Area Mesh www.sfwem.net.
AREDN is Copyright © 2015-2021 Amateur Radio Emergency Data Network Inc. More information on AREDN can be found at www.arednmesh.org
Funds for the development of MoW were provided by a grant from Amateur Radio Digital Communications (ARDC). Experiments with MoW were conducted at the Naval Postgraduate School (NPS)'s Joint Inter-agency Field Experiment 21-4 (JIFX) in August 2021.
Bill of Materials
The bill of materials (BoM) is primarily sourced from commercial off-the-shelf (COTS) components.
- Ubiquiti SunMAX SolarSwitch solar charge controller (SCC) ($199)
- Ubiquiti airMAX RocketM 5 GHz BaseStation ($89), running the AREDN firmware
- Raspberry Pi: Node-RED & local compute
- Adafruit Ultimate GPS Logging Shield ($29.95)
- HackRF: Wideband software defined radio (SDR) ($339.95)
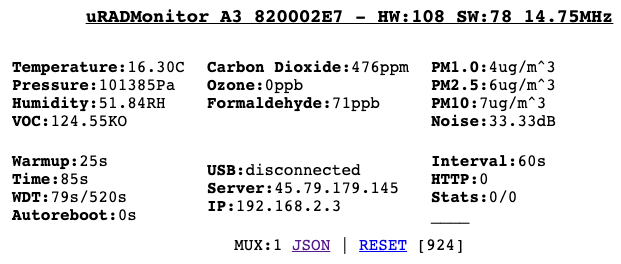
- uRadMontior model A3: Environment & air quality monitoring station ($549.00)
- 12V to 5V DC Converter Buck Module ($9.99)
- 24 VDC (2x 12 VDC) SLA batteries in series
- Wide-band VHF/UHF Receive Antenna
- Laird VMD24493RSM-366 Omnidirectional MIMO WiFi Vehicle Antenna
- GPS Antenna
- Solar Panel(s)
- Pelican-style rugged outdoor enclosure
- "fish tank grids" for structural reinforcement
A follow-up design included a Ubiquiti NanoBeam to offload establishing an IP-tunnel connection to a larger mesh network.
System Description

Mesh radio
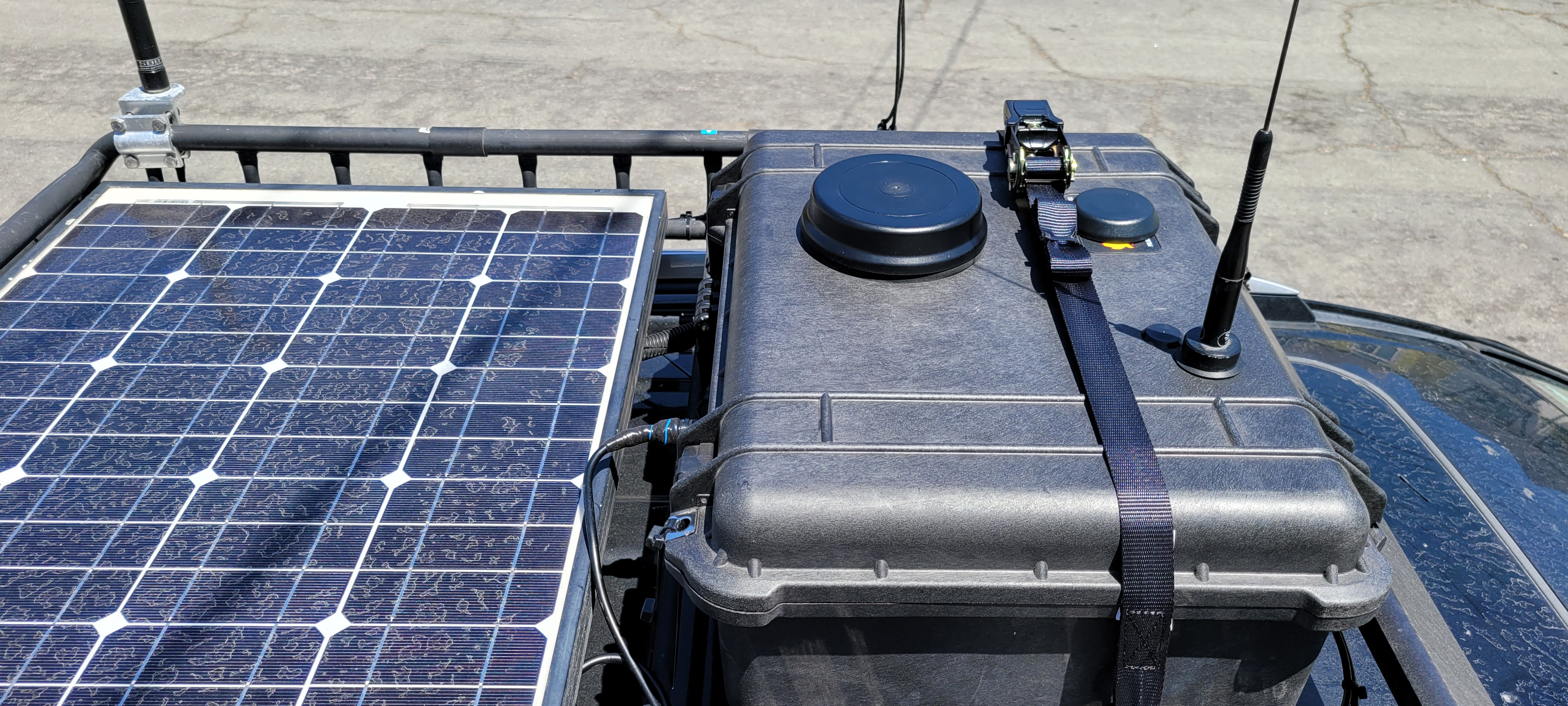
The mesh radio sub-system consists of a Ubiquiti Rocket M5 5 GHz wireless radio running the AREDN mesh firmware and an off-the-shelf omnidirectional MIMO 5 GHz antenna permanently mounted to the lid of a Pelican-style rugged enclosure.
Power
The power sub-system consists of a solar panel, solar charge controller and batteries. Run-time & power consumption can be tuned to meet mission need by adding or removing other sub-components (such as environmental sensors or edge-compute). Given sufficient sunlight a MoW can run unattended for an indefinite amount of time.
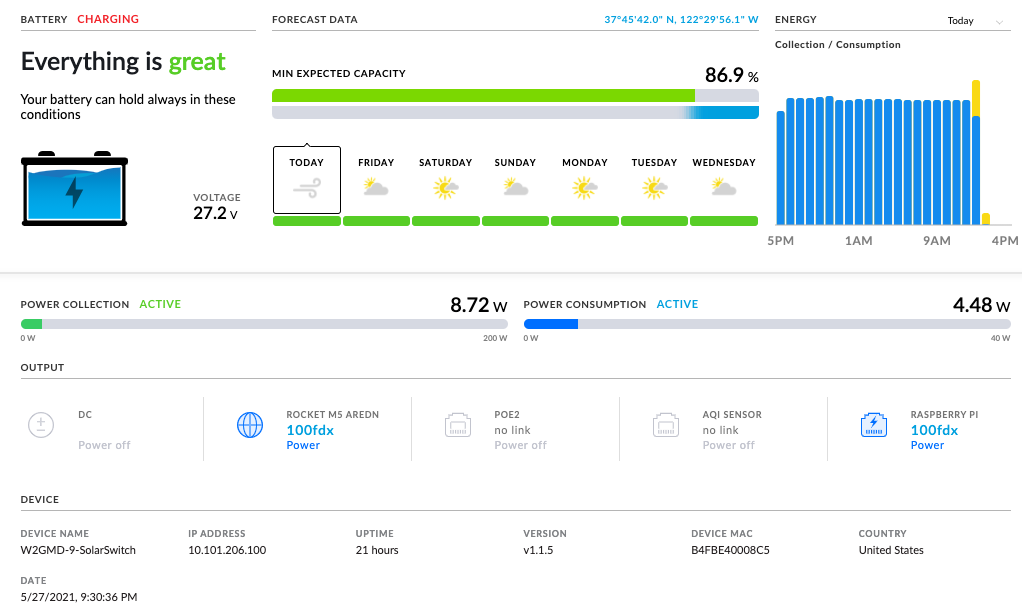
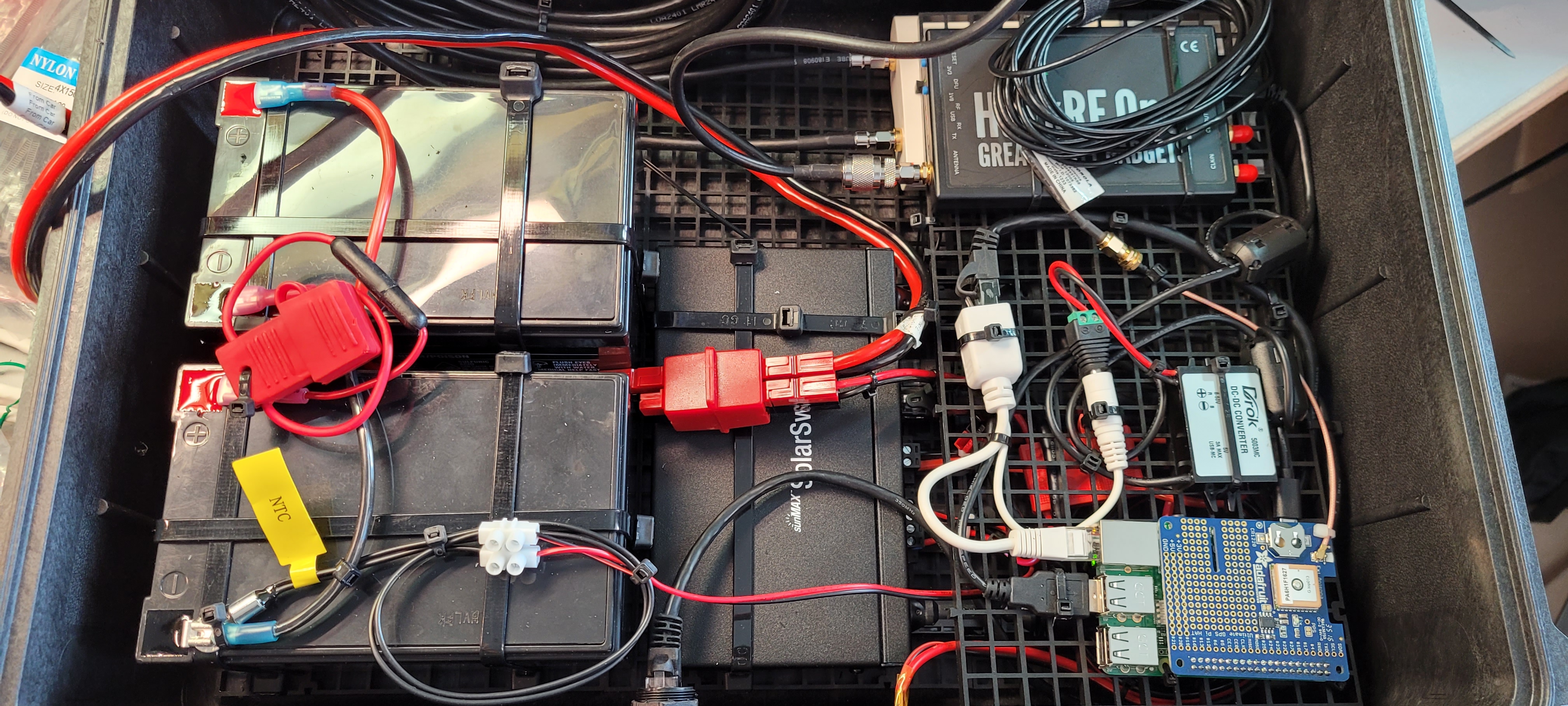
The Ubiquiti SolarSwitch was chosen based on familiarity with existing Ubiquiti products, and was compelled by features like web administration, power customization, real time readout, and SNMP. Batteries are two 12 VDC SLA batteries in series to produce 24 VDC.
Special thanks to Adam O'Donnell N3RCS for contributing the solar panel used in the proof-of-concept prototype MoW.
Edge Compute

Edge compute capabilities are provided by a Raspberry Pi running Raspberry OS with Node-RED. This allows for a rapid SA or ISR data-pipeline reconfiguration, fitting new mission or end-user needs.
For example, the on-board SDR can be quickly tasked to receive and parse aircraft ADS-B, making it available to all users of the connected MANET through their COP or SA platform of choice (ATAK, WinTAK, etc).
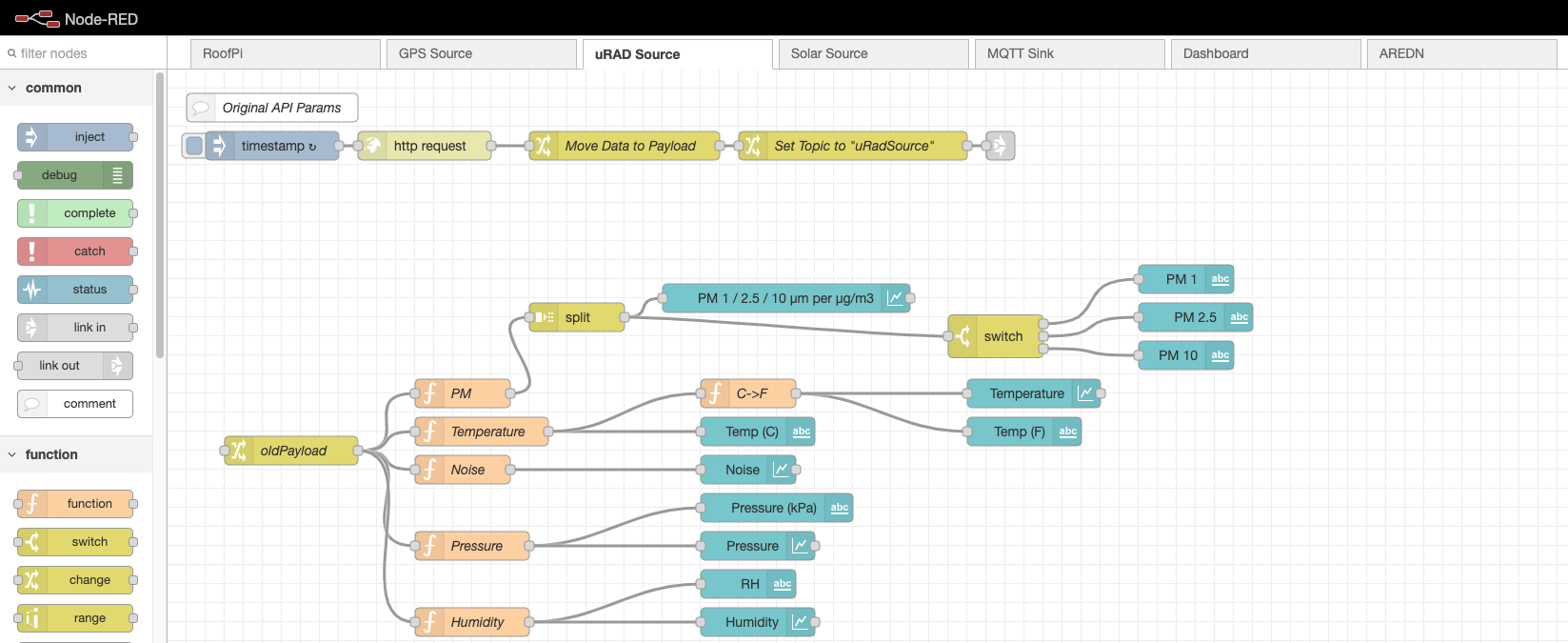
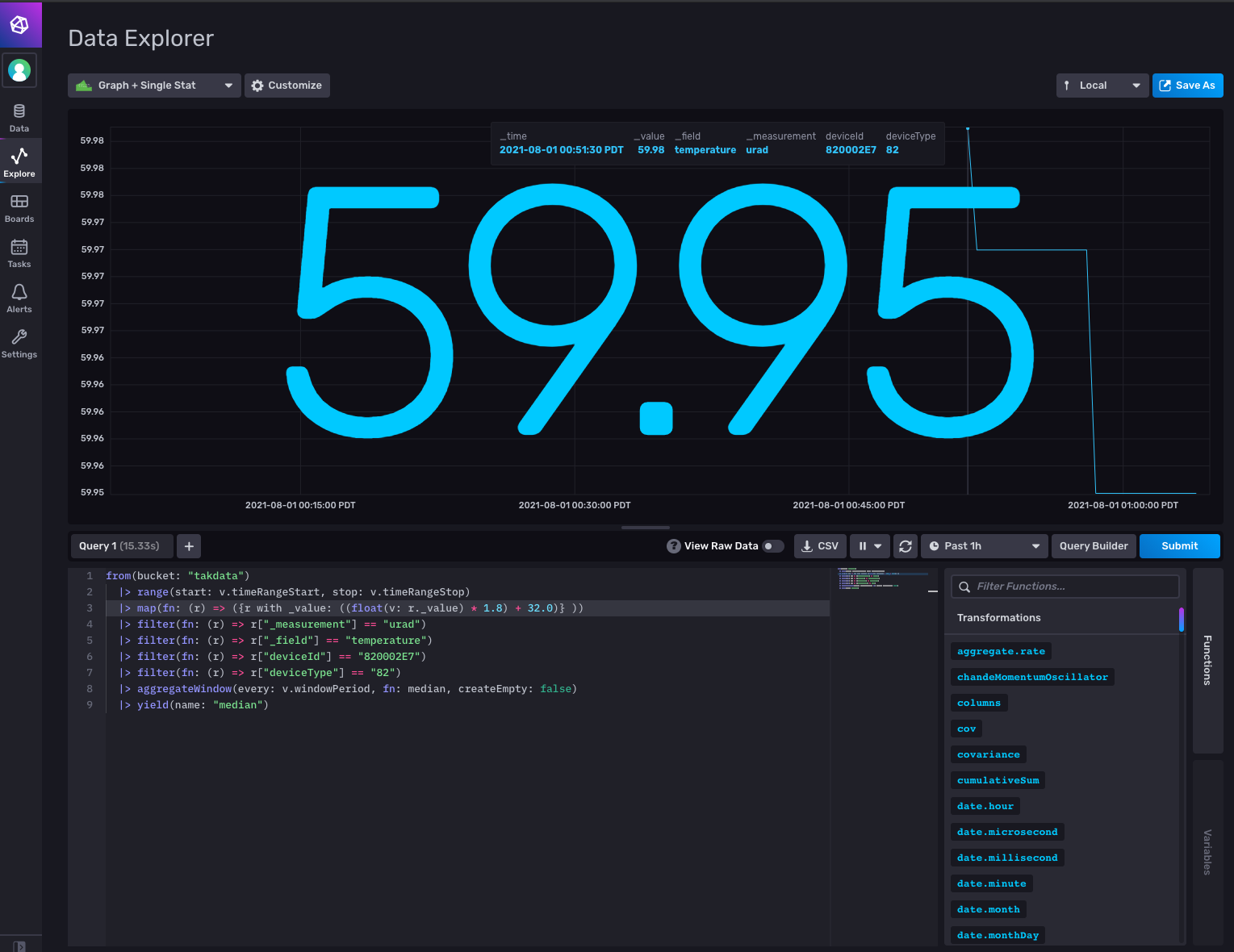
The addition of a GPS and SDR allowed real-time RF intercept and positional data to be collected and transformed locally or back-hauled to a a InfluxDB or Splunk data collection system.